مقاله پذیرفته شده شرکت ویستا آسمان در کنفرانس سالانه مواد و ساختارهای هوشمند سال 1401 با عنوان شبیهسازی انتشار موج التراسونیک مبدل آرایه فازی ربات HI-RTHRTI(U-E)CR در ریفرمرتیوب احیا مستقیم به روش FEM
ربات بازرسی ریفرمر تیوب HI-RTHRTI(U-E)CR یک دستگاه با قابلیت عیب یابی ریفرمر تیوب های مورد استفاده در صنایع فولاد، نفت، گاز و پتروشیمی به خصوص ریفرمرتیوب احیا مستقیم است که با استفاده از سیستم های مختلف بازرسی اقدام به بررسی وضعیت سلامت تیوب های کاتالیستی کرده و عمر باقی مانده تیوب ها را تخمین میزند.یک مدل شبیهسازی عددی بر اساس روش اجزای محدود (FEM)و تحلیل موج برای مطالعه میدان صوتی یک دستورالعمل خطی و مبدل آرایه فازی اولتراسونیک (LUPA) پیشنهاد و انتشار موج اولتراسونیک در جامد همسانگرد مطالعه و قانون تاخیر کنترل کننده اسکن الکترونیکی مبدل LUPA تجزیه و تحلیل می شود. آزمایشها نشان میدهند که این مدل میتواند به طور موثر و دقیق میدان تابش تمرکز پرتو، هدایت و اسکن الکترونیکی یک مبدل آرایه فازی خطی را پیشبینی کند. با استفاده از روش پیشنهادی پارامترها را می توان به راحتی برای مطالعه میدان صوتی پرتو اولتراسونیک در محیط تغییر داد که برای طراحی و استفاده از مبدل آرایه فازی خطی و بازرسی نقص در زمینه NDT بسیار مفید است.
کلید واژهها: ریفرمرتیوب احیا مستقیم ،آرایه فازی اولتراسونیک ، شبیه سازی عددی، HI-RTHRTI(U-E)CR
1 مقدمه
انتقال حرارت یک عامل مهم در “ترک خوردن” اجزا در طول فرآیندهای شیمیایی است. ریفورمرتیوب، تیوب های آلیاژی ریختگی مقاوم در برابر حرارت هستند که در کورههای ریفرمینگ بخار برای تولید هیدروژن، یک ماده ضروری برای فرآیندهایی مانند گوگردزدایی در کارخانههای پالایش نفت، سنتز آمونیاک برای تولید کود، تولید متانول و احیای مستقیم فولاد استفاده میشوند. در فرآیند ریفرمینگ بخار، عمدتاً نفتا و بخار با فشار 3 مگاپاسکال یا بالاتر تا دمای 800-1200 درجه سانتیگراد گرم می شوند. ریفورمرتیوب احیا مستقیم مورد استفاده در محیط های شدید تحت دما و فشار بالا باید مقاومت بالایی در برابر گرما و مقاومت بسیار بالایی در برابر آسیب خزش داشته باشند. امروزه دستگاه های بازرسی سطوح خارجی و همچنین پاک کننده سطوح خارجی و داخلی لوله ها و یا ریفورمر تیوب ها توسط شرکت های مختلف ارائه شده است. اما مزیت دستگاه HI-RTHRTI(U-E)CR در این است که همه ی این مزایا را بصورت یکپارچه و تنها با تغییر ابزار مورد نیاز بر روی ربات متحرک به صورت همزمان قابل اجرا و استفاده میکند. هیچ دستگاهی با چنین قابلیتهایی در دنیا موجود نیست. از سوی دیگر روشی قابل اطمینان و بدون خطرات جانبی و مسایل و مشکالت ایمنی در مقایسه با رادیوگرافی می باشد. فناوری آرایه فازی اولتراسونیک(ultrasonic phased array) در زمینه آزمایش غیر مخرب صنعتی (NDT) محبوب شده است [1]. مبدل UPA را می توان به طور عمده به مبدل UPA خطی 1 بعدی (linear UPA) و مبدل UPA دو بعدی تقسیم کرد. امروزه مبدل LUPA به طور گسترده در زمینه NDT مورد استفاده قرار گرفته است. مبدل LUPA با مبدل اولتراسونیک سنتی متفاوت است. دومی فقط از یک عنصر پیزوالکتریک تشکیل شده است در حالی که اولی از عناصر پیزوالکتریک زیادی تشکیل شده است که می توانند به صورت الکترونیکی برای هدایت یا تمرکز پرتوهای اولتراسونیک در یک محدوده خاص کنترل شوند. این امر سرعت و دقت بازرسی را بهبود می بخشد. با این حال، نحوه کنترل پرتوهای اولتراسونیک به منظور شناسایی موثر یک نقص برای کاربردهای NDT بسیار مهم است. علاوه بر این، فرآیند انتقال پرتوهای اولتراسونیک مورد استفاده در LUPA NDT بسیار انتزاعی است و درک آن برای بازرس بسیار دشوار است که ممکن است در تشخیص و مشخصه یابی عیب مشکلاتی ایجاد کند. بنابراین، درک ویژگی های پرتو تابشی به منظور کنترل میدان اولتراسونیک برای بازرسی ضروری است. (ریفرمرتیوب احیا مستقیم :شبیه سازی انتشار موج التراسونیک)
بسیاری از روشهای مختلف برای شبیهسازی میدان صوتی به صورت جداگانه توسعه یافتهاند، مانند روش تابع واکنش لحظهای[2]، روش زمان تفاضل محدود (finite Difference Time) [3]، مدل پرتو اولتراسونیک چند گاوسی (multi-Gaussian) [4] و روش انتگرال محدود [5]. تابع واکنش لحظهای روش شبیه سازی میدان صوتی است که فشار را در هر نقطه میدان محاسبه می کند. تابع واکنش لحظهای در هر نقطه طول تقاطع سهم بین منبع اولتراسوند و یک موج کروی است. یک مطالعه دقیق تر از فرآیند انتشار اولتراسونیک بر اساس مدل منبع نقطه ای ساده در [5] توضیح داده شده است. یک نمای فوری از میدان موج داده شده است. اما این روش ها محاسبات فشرده و زمان بر هستند. کارآمدترین و همه کاره ترین مدل مبدل تک عنصری، مدل پرتو MG یا مدل پرتو MG بهبود یافته است [6]. مدلهای پرتو MG، انتشار پرتوهای گاوسی را در محیط بازرسی شده با قرار دادن تعدادی از پرتوهای گاوسی شبیهسازی میکنند. این رویکرد از نظر محاسباتی سریع است. اما هنگام شبیهسازی یک پرتو اولتراسونیک فرمان که توسط یک مبدل UPA منتقل میشود، مدلهای پرتو MG دقت خود را از دست میدهند زیرا مدلها بر تقریب پاراکسیال تکیه میکنند [7]. در این مقاله، یک مدل پیچیده FEM جدید همراه با معادلات موج برای شبیهسازی میدان تابشی مبدل آرایه اولتراسونیک خطی که در حالت اسکن الکترونیکی برای NDT به روشی کارآمدتر و آسانتر کار میکند، توسعه مییابد. (ریفرمرتیوب احیا مستقیم :شبیه سازی انتشار موج التراسونیک)
در مقایسه با مدلهای گاوسی، روش اجزای محدود (finite element method) دقت محاسباتی نسبتاً بالاتری دارد. مقاله به شرح زیر مرتب شده است. اصل کنترل اسکن الکترونیکی در بخش 2 آورده شده است. مدل سازی FEM همراه با انتشار موج در جامد همسانگرد در بخش 3 معرفی شده است. نتایج شبیه سازی برای مبدل آرایه فازی خطی در عناصر مختلف در بخش 4 نشان داده شده است که این روش می تواند به طور موثر میدان تابش مبدل آرایه فازی خطی را پیش بینی کند. (ریفرمرتیوب احیا مستقیم :شبیه سازی انتشار موج التراسونیک)
2 اصل کنترل اسکن الکترونیکی
اسکن الکترونیکی را می توان به عنوان روی هم قرار دادن تمرکز و هدایت پرتوهای اولتراسونیک دید. از آنجایی که اسکن الکترونیکی مختلف را می توان با تغییر پارامترهای مبدل آرایه به دست آورد، مطالعه روش کنترل میدانی مورد نیاز است. (ریفرمرتیوب احیا مستقیم :شبیه سازی انتشار موج التراسونیک)
2-1 اصل اسکن الکترونیکی خطی
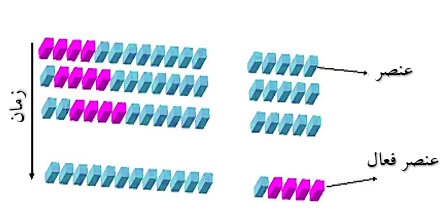
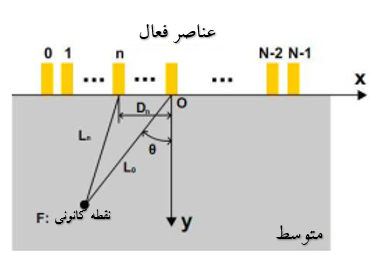
پارامترهای اصلی یک مبدل LUPA عبارتند از: دیافراگم A، گام عنصر p، فاصله عنصر g، عرض عنصر W و شماره عنصر N. پیکربندی کلی اسکن الکترونیکی یک مبدل LUPA در شکل 1 نشان داده شده است. گروهی از عناصر مجاور در امتداد جهت طولی با استفاده از قانون کانونی یکسان بهطور متوالی برانگیخته میشوند و باعث میشود پرتو موج مصنوعی ناحیه خطی زیر مبدل آرایه را با زاویه ثابت و در عمق کانونی ثابت اسکن کند، همانطور که در شکل 2 نشان داده شده است ]8[. این معادل اسکن سریال مبدل های اولتراسونیک سنتی است. در مقایسه با مبدل اولتراسونیک سنتی، مبدل LUPA نیازی به حرکت دادن عناصر ندارد و به سادگی می توان آن را به صورت الکترونیکی کنترل کرد. (ریفرمرتیوب احیا مستقیم :شبیه سازی انتشار موج التراسونیک)
قانون تاخیر کنترل برای اسکن الکترونیکی
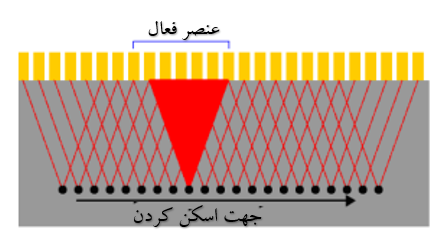
سیستم مختصات مبدل آرایه خطی در شکل 3 تعریف شده است. نقطه اصلی نقطه مرکزی عنصر (N/2) ام است. بنابراین، اگر یک عنصر (عنصر n) برانگیخته شود، فاصله را می توان به صورت معادله (1) بیان کرد.

فاصله از نقطه کانونی تا عنصر nام برابر است با:

جایی که θ زاویه فرمان، D0 فاصله بین نقطه مرکزی عنصر n و نقطه اصلی، L0 فاصله از نقطه کانونی تا نقطه مرکزی عنصر n است. قانون کنترل تاخیر تمرکز و هدایت یک پرتو اولتراسونیک را می توان با اختلاف زمان انتشار به صورت رابطه (3) بیان کرد:

جایی که Δτn به عنوان مقدار زمان تاخیر هر عنصر توصیف می شود، c سرعت اولتراسونیک در ماده است. مقدار τ0 به طور مداوم به اندازه کافی بزرگ است تا از تاخیر زمانی منفی جلوگیری شود.
1 مدل سازی FEM همراه با تجزیه و تحلیل انتشار موج
بر اساس قانون بقای انرژی، قانون بقای تکانه، معادله حالت محیط و تقریب دامنه کوچک، معادله خطی میدان صوتی در محیط جامد الاستیک را می توان به صورت زیر نوشت:

که ρ چگالی محیط، μ میدان جابجایی، C ضریب الاستیک و F نیروی خارجی است. معادله (4) معادله موج صوتی فعال است. عموماً انتشار امواج صوتی در یک فضای نیمه نامتناهی در نظر گرفته می شود و بنابراین نیروی خارجی وجود ندارد. این شکل معادله هلمهولتز نیز نامیده می شود. از آنجایی که ویژگی های انتشار میدان صوتی در محیط های مختلف متفاوت است، معادله میدان صوتی در محیط همگن و همسانگرد در اینجا آورده شده است. با معرفی ثابت Lame در محیط جامد همسانگرد، معادله میدان صوتی را می توان به صورت معادله (5) بازنویسی کرد:

که در آن λ، v ثابت های Lame هستند. با تجزیه هلمهولتز، بردار جابجایی به صورت گرادیان اسکالر و پیچش بردار درجه پراکنده بیان می شود. بر اساس روش استاندارد روش اجزای محدود، حوزه محاسباتی به تعدادی عنصر و گره تقسیم می شود. پس از ساخت توابع جابجایی، جابجایی هر نقطه در منطقه را می توان با الگوریتم درون یابی جابجایی گره و جابجایی حل کرد و سپس ترکیب با روش گالرکین [9] و تغییر مکان گره دلخواه را طبق معادله (5) می توان به صورت زیر صادر کرد:

که در آن ä(t) و به ترتیب بردار شتاب و بردار سرعت گره هستند. M ماتریس جرم سیستم، D ماتریس میرایی، K ماتریس سختی و Q(t) بردار بار گره است. M، D، K و Q به ترتیب توسط بردار ماتریس واحد آن یکپارچه می شوند.

که در آن ä(t) و به ترتیب بردار شتاب و بردار سرعت گره هستند. M ماتریس جرم سیستم، D ماتریس میرایی، K ماتریس سختی و Q(t) بردار بار گره است. M، D، K و Q به ترتیب توسط بردار ماتریس واحد آن یکپارچه می شوند.

که در آن ، و ماتریس جرم واحد، ماتریس میرایی واحد و ماتریس سختی واحد هستند. Qe بردار بار گره است. به طور کلی، میرایی نادیده گرفته می شود. همراه با روش گالرکین و ویژگی دلخواه متغیر جابجایی گره، معادله حرکت یا معادله ارتعاش سیستم را می توان استنباط کرد.
1 نتایج مدلسازی و شبیهسازی
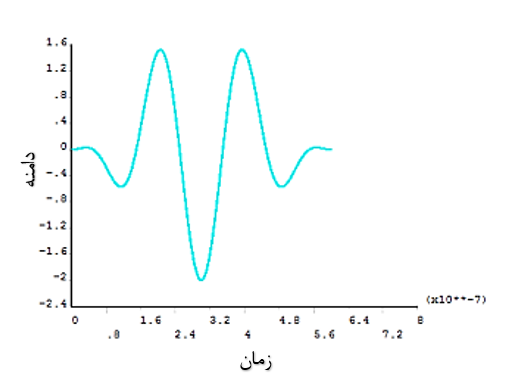
روشی که میدان صوتی یک مبدل LUPA را شبیهسازی میکند بر اساس روش اجزای محدود (FEM) و تحلیل موجی است که در بالا معرفی شد. فرمول ریاضی منبع تحریک به صورت معادله (8) نشان داده شده است.

در شرایطی که 0,t باشد. نمودار شکل موج سیگنال تحریک در شکل 4 نشان داده شده است.
4 مدل سازی فوکوس پرتو
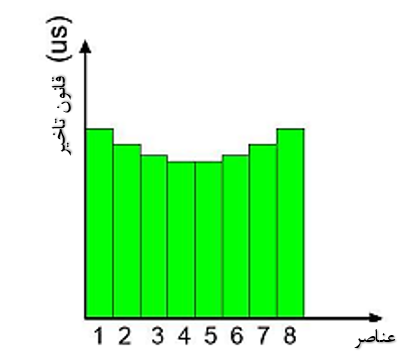
با کنترل زمان تأخیر عناصر مبدل، انرژی پرتوهای اولتراسونیک را می توان در همان نقطه متمرکز کرد. با تغییر قانون تاخیر می توان پرتوهای اولتراسونیک را در عمق های مختلف متمرکز کرد. با قانون تأخیر متقارن می توان با عمق فوکوس متفاوت مواجه شد. قانون تاخیر در شکل 5 نشان داده شده است.
در اینجا، N=8، f=5MHz، g=2mm
نمای فوری میدان موج در زمان انتشار µs 2.15 در شکل 6 (a) نشان داده شده است. شکل 6(b) تصویر انتشار موج اولتراسونیک گذرا را در زمان انتشار 3.76 میکرو ثانیه نشان می دهد.
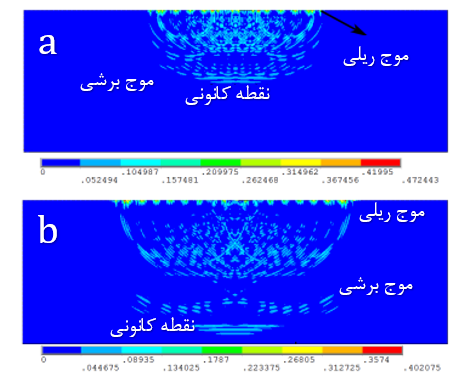
طولی روی هم قرار می گیرد. دامنه موج اولتراسونیک در نوار رنگ نشان داده شده است. رنگ آبی سرمه ای نشان دهنده مقدار دامنه کم است که حدود صفر است. امواج اولتراسونیک که از هر عنصر تولید می شود، امواج گذرا هستند که از موج برشی، موج طولی و موج ریلی تشکیل شده اند. موج برشی پشت نقطه کانونی قرار میگیرد، زیرا سرعت موج برشی کندتر از موج طولی است. نتیجه نشان می دهد که خاصیت تمرکز موج برشی ضعیف است. موج ریلی فقط در سطح محیط پخش می شود. سه خط کوتاه وجود دارد که نشان دهنده نقطه کانونی در شکل 6 (a) است. این به این دلیل است که منبع موج دارای سه قله است. همانطور که در شکل 6 (b) نشان داده شده است، تغییر قانون تاخیر می تواند عمق کانونی را عمیق تر کند. قوانین تاخیر شکل 6(a) و شکل 6(b) در جدول 1 فهرست شده اند و طبق رابطه (3) محاسبه شده اند. بنابراین، پرتو اولتراسونیک را می توان با انتخاب قوانین تاخیر مختلف در مکان های مختلف در جهت عمق متمرکز کرد.

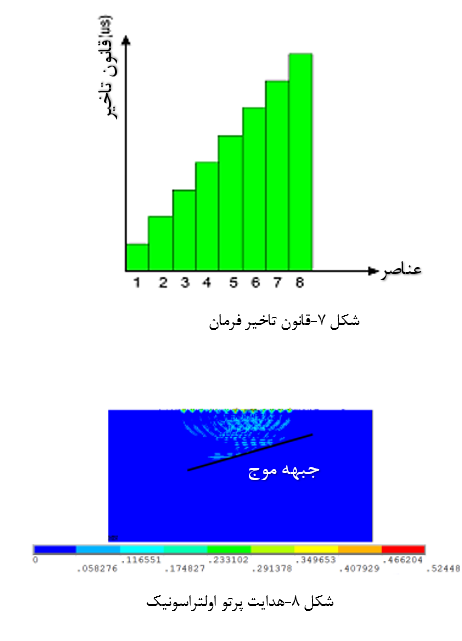
مدل سازی فرمان پرتو
زاویه فرمان پرتو اولتراسونیک را می توان با کنترل زمان تاخیر هر عنصر تغییر داد. قانون تاخیر در شکل 7 نشان داده شده است. در اینجا سری های زمانی تاخیر، دنباله های حسابی هستند. تاخیر زمانی تحریک بین دو عنصر مجاور 0.1 میکروثانیه است. در اینجا، N=8، f=5MHz، g=2mm. زاویه فرمان تئوری 15.893 درجه است. نتیجه شبیه سازی با مقدار نظری در شکل 8 منطبق است. نتیجه نشان می دهد که امواج اولتراسونیک به صورت نیم دایره منتشر می شوند. دایره های شکل 8 که بر اساس اصل هویگن روی هم قرار گرفته اند، جبهه موج را در صفحه تشکیل می دهند.
نتیجه گیری
یک مدل شبیهسازی عددی FEM همراه با تحلیل معادلات موج برای مطالعه میدان صوتی یک مبدل LUPA در تمرکز پرتو، هدایت و عملکرد اسکن الکترونیکی مورد استفاده در ربات HI-RTHRTI(U-E) CR ارائه شد. امواج تولید شده از عناصر به عنوان امواج اولتراسونیک گذرا ساده شده در نظر گرفته شد. این مدل می تواند به طور موثر و دقیق میدان تابش مبدل LUPA را پیش بینی کند. انتشار امواج اولتراسونیک در جامد همسانگرد را می توان به صورت تصاویر ابر جابجایی مشاهده و نشان داد. تصاویر فوری از انتشار امواج اولتراسونیک داده شد. با استفاده از روش پیشنهادی، پارامترها را می توان به راحتی برای مطالعه میدان صوتی پرتو اولتراسونیک در محیط تغییر داد. این می تواند منابعی را برای طراحی و کاربرد مبدل آرایه فازی خطی و بازرسی نقص در زمینه NDT فراهم کند.
شرکت ویستا اسمان پیشرو در زمینه تحقیقات علمی و ارائه جدیدترین سیستم های نوآورانه، اولین شرکت ایرانی ثبت کننده اختراع ربات بازرسی ریفرمرتیوب. جهت کسب اطلاعات بیشتر و بهره مندی از خدمات و محصولات ما، با ما در تماس باشید.